4.4 Моделі мічення-відлову
Скажімо, ви випустились із біологічного факультету і одразу знайшли роботу у місцевому заповіднику. І ось керівництво ставить перед вами задачу: для літопису природи ви маєте порахувати скільки щук живе в заповідному ставку. Звісно, можна спустити воду, встановити на зливі сітку аби жодна рибина не втекла, і порахувати дохлих риб на дні осушеної водойми – підхід радикальний, точний, але трохи не узгоджується із філософією заповідання природи. Можна спитати місцевих рибалок49 скільки, на їх думку, щуки у ставку – оцінки чисельності видів з вуст профільних фахівців, дійсно, досі застосовуються для інформування природоохоронних ініціатив коли недостатньо конкретних даних, але такий метод застарілий50.
Як сумлінний працівник природо-заповідного фонду, ви можете отримати всі необхідні дозволи, схопити вудку, і перевірити скільки щук вдасться зловити за день. Звісно, ви не браконьєр, тож кожну рибину ви випускаєте одразу після вилову. Скажімо, зловили три рибини. Так от тепер питання: а чи ви впевнені в тому, що ви зловили три різні особини, чи, може, це була одна нещаслива щука, котра тричі потрапила на гачок. От якби ви маркували кожну виловлену щуку, скажімо, пластиковою міткою при основі плавця, то на це питання було би набагато простіше відповісти.
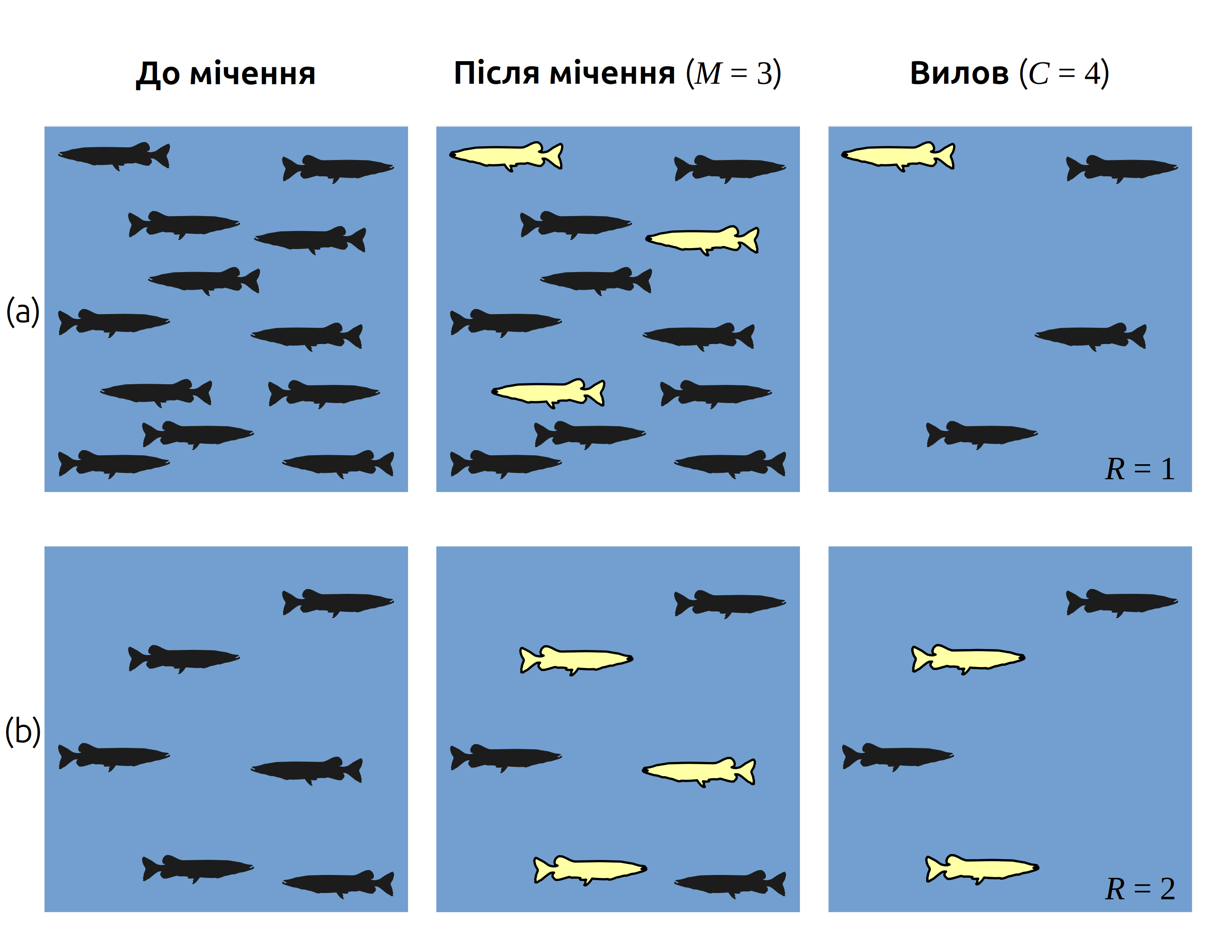
Рис. 4.2: Гіпотетичний приклад оцінки розміру популяції щук за допомогою методу вилову-мічення-відлову. Щуки, на котрих причепили пластикову мітку, виділені жовтим. В обох ставках помаркували і відпустили \(M = 3\) рибини, і в наступному раунді виловили \(C = 4\) рибини, записавши скільки із виловлених рибин мають мітку. В ставку (a) реальний розмір популяції \(P_a = 12\), і оцінка розміру популяції становитиме \(\hat{P}_a = M \cdot C / R = 3 \cdot 4 / 1 = 12\). В ставку (b) справжній розмір популяції становить \(P_b = 6\), що співпадає із результатами оцінки міченням-відловом: \(\hat{P}_b = 3 \cdot 4 / 2 = 6\).
Якщо ви відмаркували три особини, і після цього кожна наступна виловлена щука має мітку, то можна зважено припустити що сумарний розмір популяції є не набагато більшим за, власне, три особини. Натомість, якщо ви протягом тижня причепили сотню міток, але продовжуєте виловлювати свіжих невідмічених рибин, то можна уявити що мічені щуки просто “розчиняються” у величезній популяції немічених риб, і, відтак, розмір цілої популяції повинен бути доволі значним (Рис. 4.2). Ба більше, можна навіть математично оцінити розмір популяції: якщо протягом одного раунду вилову щук вам вдалося помітити і відпустити \(M\) щук; ви почекали декілька днів чи тижнів поки мічені риби перемішаються в популяції, і здійснили другий раунд вилову, протягом якого зловили \(C\) щук із яких \(R\) гордо несли вашу мітку із першого раунду; тоді розмір цілої популяції можна оцінити як
\[\hat{P} = \frac{MC}{R}\]
Такий підхід зветься “вилов-мічення-вилов” (capture-mark-recapture). У ситуації із щуками вище для того, аби математика адекватно працювала, має зберігатись одна дуже важлива умова: популяція повинна бути незмінною між двома раундами вилову. В природних популяціях, звісно, існує смертність, народжуваність, міграція, тож розмір популяції не є сталим, тому оцінки розміру популяції будуть неточними – не кажучи вже про те, що точність оцінок також залежить від кількостей виловлених особин. Ця модель може бути ускладнена, наприклад, аби врахувати дискретність раундів виловлення чи, навпаки, континуальність часу коли особини виловлюються по одній (Chao 2001), або обійти припущення про закритість популяції (Lindberg 2010).
Загалом, існує чимало варіацій моделей мічення-вилову, наприклад, що враховують просторову нерівномірність популяцій (Borchers & Efford 2008), різні статуси особин залежно від віку, локації тощо (Lebreton et al. 2009), або можуть бути використані без безпосереднього мічення особин а, скажімо, для даних із фотопасток (Karanth et al. 2006; це вимагає, втім, визначення окремих особин за індивідуальними ознаками). Вибір конкретного дизайну дослідження із застосуванням методу мічення-вилову вимагає обережного врахування додаткових параметрів досліджуваної популяції й особливостей об’єктів дослідження (Lindberg 2010) – іншими словами, експериментальний дизайн для оцінки чисельності популяції щуки може виявитись не надто вдалим для подібного дослідження популяцій лебедів.
Оригінальна модель мічення-відлову була запропонована Петерсеном (Petersen 1896) і незалежно розвинута Лінкольном (Lincoln 1930), тож іноді можна зустріти термін “модель Петерсена–Лінкольна”. Пізніше на основі оригінальної моделі Петерсона–Лінкольна, була запропонована модифікації оцінщика розміру популяції і шляхи оцінки його варіації (Chapman 1951):
\[\hat{N} = \frac{(M+1)(C + 1)}{(R+1)}, \text{Var}[\hat{N}] = \frac{(M+1)(C+1)(M-R)(C-R)}{(R+1)^2 (R+2)}\]
Моделі мічення-вилову із закритими популяціями мають три головні вимоги до експериментальних даних:
Популяція є закритою, тобто реальний розмір популяції не має змінюватись між двома сесіями вилову особин. Такі зміни в реальних популяціях можуть відбуватись через розмноження, смертність (наприклад, від хижаків), міграційні процеси. Найпростіший спосіб виконати цю вимогу в польових умовах – це обрати якомога менший інтервал часу між сесіями вилову, якого би вистачило для перемішування маркованих особин в популяції.
Жодні відмітки (мітки риб, кільця птахів тощо) достатньо добре зафіксовані на організмі, аби не загубитись і бути помітними коли дослідник повторно виловлює організм. Логіка доволі проста: якщо мітка загубилась, то як можна дізнатись що організм був відмічений?
Ймовірність вилову особини не залежить від того, чи вона була відловлена до цього. Необхідно пересвідчитись, що час вилову не впливає на ймовірність особини бути відловленою, а отже під час повторної сесії вилову відмічені особини мають таку ж ймовірність потрапити до вилову, як і невідмічені. Це може бути проблематично якщо ваш об’єкт дослідження має високі когнітивні здібності і після неприємного досвіду отримання мітки виробив поведінку уникнення двоногих із сіткою.
Не варто вважати, що методи мічення-відлову можуть бути тільки застосовані до тварин. Хоча рослини й не настільки рухомі, процес збирання вибірки в ботанічних дослідженнях доволі подібний: організм існує в середовищі, дослідник намагається знайти цей організм, але ймовірність детекції є меншою за одиницю адже певні фактори можуть ускладнити спостереження. Для рослин, наприклад, це може статися якщо різні стадії мають різний вигляд (легше побачити яскраву квітку аніж ледь-помітний проросток), або суто через помилку спостерігача і невеликі варіації в зборі даних (ну ви точно не перейдете поле з точністю крок в крок). Готеллі й Еллінсон (2012) наводять непоганий ілюстративний приклад із трьома сесіями пошуку орхідей, де в якості “мічення” використовувались GPS-координати знайдених рослин. Якщо координати повторювались між сесіями, то можна уявити що рослини на цих координатах є “міченими” і “відловленими”.
Підхід максимальної правдоподібності можна використати для додавання нових параметрів в модель мічення-відлову: наприклад, певні характеристики особин які роблять їх більш помітними для відлову, або ймовірності вилову особин під час сесії вилову (Huggins 1989). Моделі із використанням максимальної правдоподібності можуть бути оцінені в межах інформаційної парадигми, що, відтак, дозволяє запропонувати декілька моделей із потенційними коваріатами ймовірності повторного вилову мічених особин, і знайти найбільш парсимонійну із таких моделей.
Звісно, екологи додумались і до моделей із відкритими популяціями, котрі порушують першу вимогу моделі Петерсона–Лінкольна і похідних. Найпершою моделлю, що передбачає демографічні процеси у відкритій популяції, є модель Джоллі–Себер (Jolly 1965, Seber 1965), яка передбачає виживання особин між сесіями вилову і сумарний вплив демографічних процесів на зміну частки відмічених особин з часом. Існують варіації цієї моделі що вимагають багаторазового вилову особин, найкраще в межах такого інтервалу часу, за якого популяція поводиться як закрита (тобто ефект демографічних змін незначний за такого інтервалу); подібно до застосування методу максимальної правдоподібності в закритих популяціях, складніші моделі можуть включати і гетерогенність параметрів вилову окремих особин (Pollock 1982).
Для практичного використання моделей мічення-вилову, корисними можуть бути спеціальні пакети для R на кшталт Rcapture, або навіть зовнішнє програмне забезпечення на кшталт MARK.
… й прихопити представників Держекоінспекції, бо на території заповідників рибальство не є надто законним.↩︎
Чисельну оцінку певної величини за допомогою опитування значної кількості спеціалістів іноді називають методом Дельфі (Delphi technique) на згадку про Дельфійського оракула. Ідея полягає в тому, що навіть якщо оцінка окремого дослідника є заангажованою, то, в середньому, упередження скасуються за рахунок оцінок від інших дослідників. Цей метод використовують в екології зрідка, але приклади існують: наприклад, урбанізацію екосистем важко оцінити, адже це явище є доволі багатогранним і жодна із коваріат урбанізації (наприклад, відносна площа вкрита асфальтом, густина населення людей, частка зелених насаджень) не змальовує всі прояви урбанізації. Втім, якщо показати супутникові знімки різних середовищ багатьом дослідникам і попросити їх відсортувати локації за їх ступенем урбанізації, то середній результат узгоджується із конвенційними методами оцінки урбанізації ландшафтів (Blair 2008).↩︎